Glossary¶
- Piecewise Polynomial¶
A piecewise function is function of the form
where
 . It is naturally possible to define
piecewise functions on unbounded domains too, but in typical applications
the domain is bounded.
. It is naturally possible to define
piecewise functions on unbounded domains too, but in typical applications
the domain is bounded.A piecewise polynomial is a piecewise function where each of the
 is a polynomial, possibly vector-valued.
With suitable number of pieces and polynomial degree, piecewise polynomials
make a highly expressive function class that is still simple
and numerically stable.
is a polynomial, possibly vector-valued.
With suitable number of pieces and polynomial degree, piecewise polynomials
make a highly expressive function class that is still simple
and numerically stable.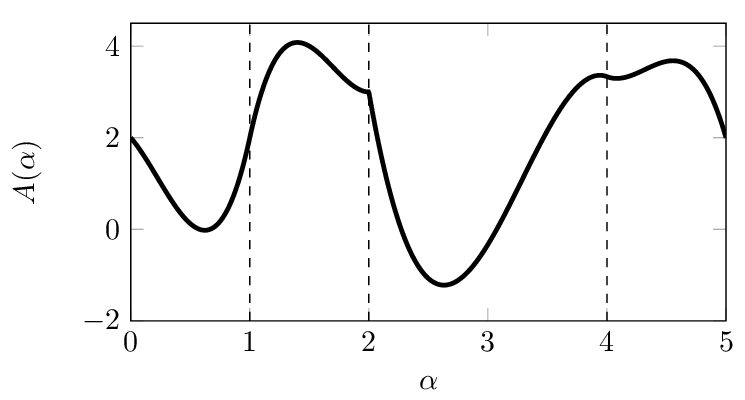
A piecewise polynomial with four pieces. At the point
 , this function is continuous but not
differentiable. Such a nonsmooth polynomial would not be used for
quadrotor trajectory planning.¶
, this function is continuous but not
differentiable. Such a nonsmooth polynomial would not be used for
quadrotor trajectory planning.¶In Crazyswarm, we use degree-7 polynomials with 4-dimensional vector-valued output: (x, y, z) position and yaw angle. The quadrotor’s differential flatness property makes it possible to compute other states (attitude, acceleration, angular velocity) from these four values.
- Setpoint¶
A collection of desired values for some or all of the quadrotor’s state that the feedback controller should try to achieve. For example, a setpoint may specify position, velocity, and acceleration – or just position.