Overview¶
Crazyswarm has the following software architecture.
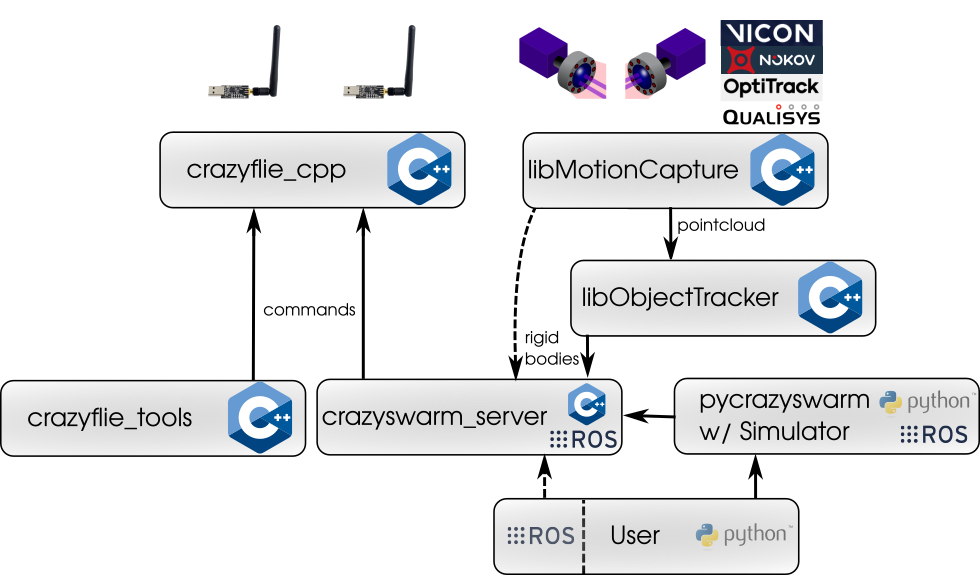
crazyflie_tools These are command line tools that can be used using rosrun crazyflie_tools <name> <arguments>. These tools include methods to list logging variables, parameters, and to reboot individual crazyflies.
crazyswarm_server This application is the core of the Crazyswarm. It provides the ROS interface, communicates with the robots and the motion capture system.
pycrazyswarm This is a simplified Python library to use the Crazyswarm. It has two backends: the physical backend (communicating with the crazyswarm_server) and the simulation backend. The simulator uses parts of the official firmware for software-in-the-loop simulation. For performance reasons, the simulation does not include the dynamics and rather visualizes the setpoints.
Helper libraries We provide a unified interface for different motion capture systems (libMotionCapture), a way to track rigid bodies frame-by-frame even with unique marker configurations (libObjectTracker), and a library for the low-level communication with the Crazyflie robots (crazyflie_cpp).
More Information¶
- Talk at the BAM days 2021
- Talk at the Aerial Swarms Workshop at IROS 2019
Slides [pdf].